Arduino controllo di un robot car tramite telecomando IR
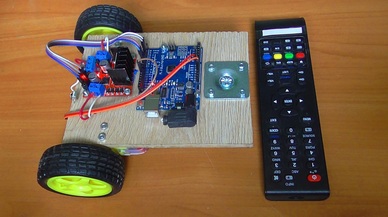
In questo progetto realizzeremo un automobilina telecomandata, tramite infrarossi, con un qualsiasi telecomando di casa.
Modificando il progetto del robottino evita ostacoli inseriremo un ricevitore infrarossi VS 1838B oppure un TSOP 1738
( cambiano solo i piedini ) al posto del sensore ad ultrasuoni.
Modificando il progetto del robottino evita ostacoli inseriremo un ricevitore infrarossi VS 1838B oppure un TSOP 1738
( cambiano solo i piedini ) al posto del sensore ad ultrasuoni.
Come vedremo avanti è molto semplice da realizzare, e con lo stesso programma si possono aggiungere luci oppure un buzzer per simulare un clacson.
Iniziamo con elencare i componenti necessari a realizzare il progettino.

La maggior parte dei componenti elencati li ho trovati nel kit su ebay e possono essere acquistati su questo link.
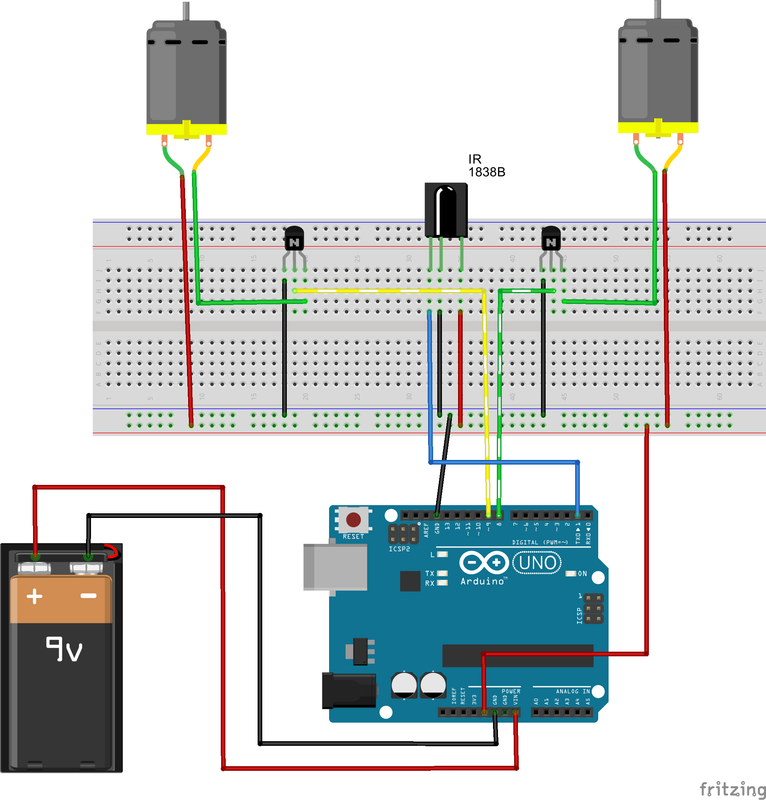
A questo punto prendiamo lo chassis del robottino ed eseguiamo i vari collegamenti seguendo questo schema:
SCHEMA:
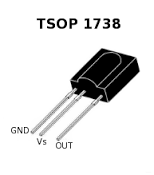
Vi consiglio di controllare il datasheet del vostro ricevitore IR prima di alimentarlo qui sotto vi riporto rispettivamente il collegamento dei piedini
del TSOP1738 e del VS 1838B.
del TSOP1738 e del VS 1838B.
|

|
Una volta effettuato il collegamento carichiamo lo sketch che avrà la funzione sia di leggere i dati inviati dal telecomando e sia di far funzionare il robottino stesso quando premiamo un qualsiasi pulsante e quindi memorizzarlo sullo sketch.
Vi ricordo di inserire la libreria IRremote.h formato zip su Arduino IDE con l`apposito comando in strumenti.
La libreria la trovate in fondo pagina insieme agli altri file.
La libreria la trovate in fondo pagina insieme agli altri file.
Scarichiamo l`ultima versione del software su arduino.cc e carichiamo il programma con l`Arduino IDE sulla nostra scheda.
Lo sketch è il seguente:
Lo sketch è il seguente:
Nota: In alcuni si presenta questo codice errore una volta effettuata la verifica dello sketch.
/usr/src/arduino/libraries/RobotIRremote/src/IRremoteTools.cpp:5:16: error: 'TKD2' was not declared in this scope
int RECV_PIN = TKD2; // the pin the IR receiver is connected to
^
Using library RobotIRremote at version 1.0.2 in folder: /usr/src/arduino/libraries/RobotIRremote
Non vi preoccupate, si risolve facilmente eliminando la cartella RobotIrRemote in C:/Programmi(x86)/Arduino/Libraries
/usr/src/arduino/libraries/RobotIRremote/src/IRremoteTools.cpp:5:16: error: 'TKD2' was not declared in this scope
int RECV_PIN = TKD2; // the pin the IR receiver is connected to
^
Using library RobotIRremote at version 1.0.2 in folder: /usr/src/arduino/libraries/RobotIRremote
Non vi preoccupate, si risolve facilmente eliminando la cartella RobotIrRemote in C:/Programmi(x86)/Arduino/Libraries
Ora apriamo il monitor seriale, puntiamo il telecomando sul ricevitore infrarossi e premiamo i pulsanti che desideriamo utilizzare per comandare l`automobilina avendo cura di trascrivere i codici di ciascun tasto. Ne occorrono 4 "Avanti", "Destra", "Sinistra" e "Stop".
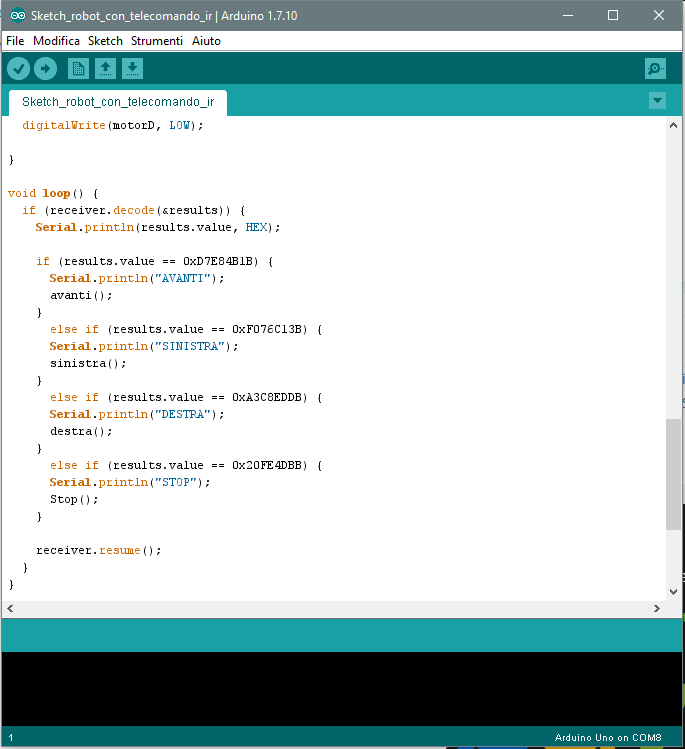
Trascritti i codici ora li andremo ad inserire nello sketch, come in foto.
Nel mio caso il codice del tasto AVANTI era D7E84B1B inserendolo in: if (results.value == 0xD7E84B1B) { e così ho fatto con gli altri pulsanti.
Carichiamo di nuovo lo sketch con i codici del telecomando e abbiamo terminato, a questo punto premendo i tasti del telecomando vedremo muovere la macchinina telecomandata ad infrarossi.
Come sempre vi lascio i file che potete scaricare liberamente.
Buona progettazione e al prossimo progetto..🖐
Buona progettazione e al prossimo progetto..🖐
| sketch_robot_con_telecomando_ir.ino |
| Libreria irremote.rar |
Condividete nei commenti le foto dei vostri progetti.