Arduino robot evita ostacoli con motor driver L298N, servomotore e HC-SR04
In questo progetto costruiremo una macchinina (Robot Car) in grado di guardarsi attorno ed evitare gli ostacoli, grazie al sensore ad ultrasuoni HC-SR04 al servo e ai motori controllati tramite il modulo L298N Dual H-Bridge Motor Controller.

Il kit si può acquistare su ebay seguendo questo link: http://rover.ebay.com/rover/1/724-53478-19255-0/1?
Per realizzarlo ho utilizzato un L298N Dual H-Bridge Motor Controller al posto dei transistor utilizzati nei progetti "57 Robot evita ostacoli" e "58 Robot telecomandato". Questo modulo ha come integrato un L298N formato da due ponti-H, sopportano fino a tensioni di 46V e 2A per ogni ponte-H. Ciascun ponte può essere attivato o disattivato tramite i piedini enable sulla scheda per comandare i due motori DC direttamente da Arduino.
Elenchiamo i componenti necessari alla realizzazione del progetto:
|

|
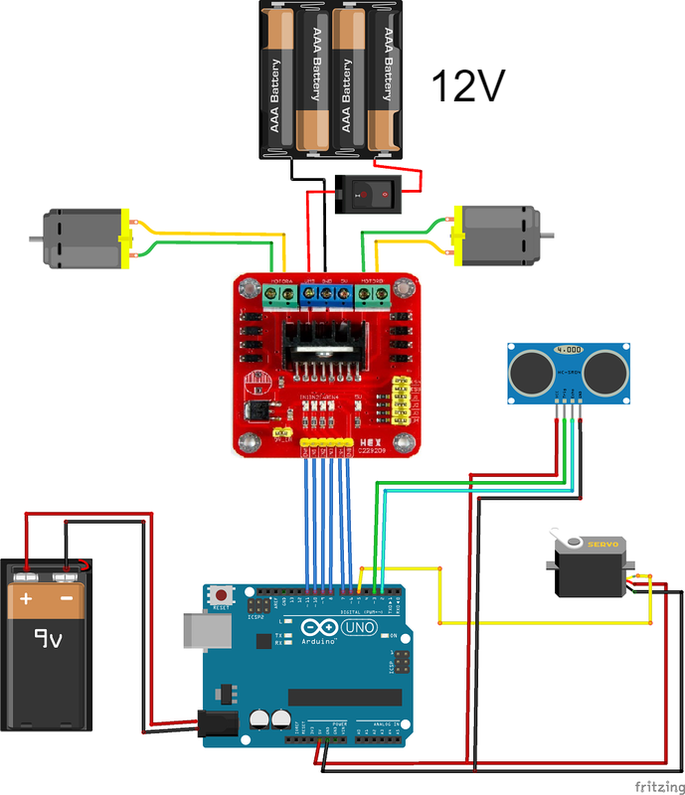
Avendo tutto l`occorrente non rimane che costruire il circuito seguendo lo schema qui sotto:
SCHEMA DI COLLEGAMENTO:
Fatto ciò programmiamo il nostro Arduino UNO inserendo lo sketch nell`IDE.
Vi consiglio di aggiornare la vostra versione del software andando su: https://www.arduino.cc/en/Main/Software
Vi consiglio di aggiornare la vostra versione del software andando su: https://www.arduino.cc/en/Main/Software
Possiamo regolare la velocità dei motoriduttori cambiando questa stringa di codice inserendo un valore che va da min 120 a max 255.

Con questo siamo arrivati alla conclusione del progetto. Prima di poggiarlo a terra controlliamo la rotazione dei motori, se il robottino non va nella direzione desiderata basta invertire i fili che vanno al motorino della ruota.
Come sempre vi lascio lo sketch già compilato da scaricare. Per qualsiasi altra informazione contattatemi.
Un saluto a tutti e al prossimo progetto.
Un saluto a tutti e al prossimo progetto.
| Sketch_arduino_robot_con_servo_hc-sr04.ino |
Condividete nei commenti le foto dei progetti realizzati da voi.